| step |
inference rule |
input |
feed |
output |
step validity (as per SymPy) |
|
1
|
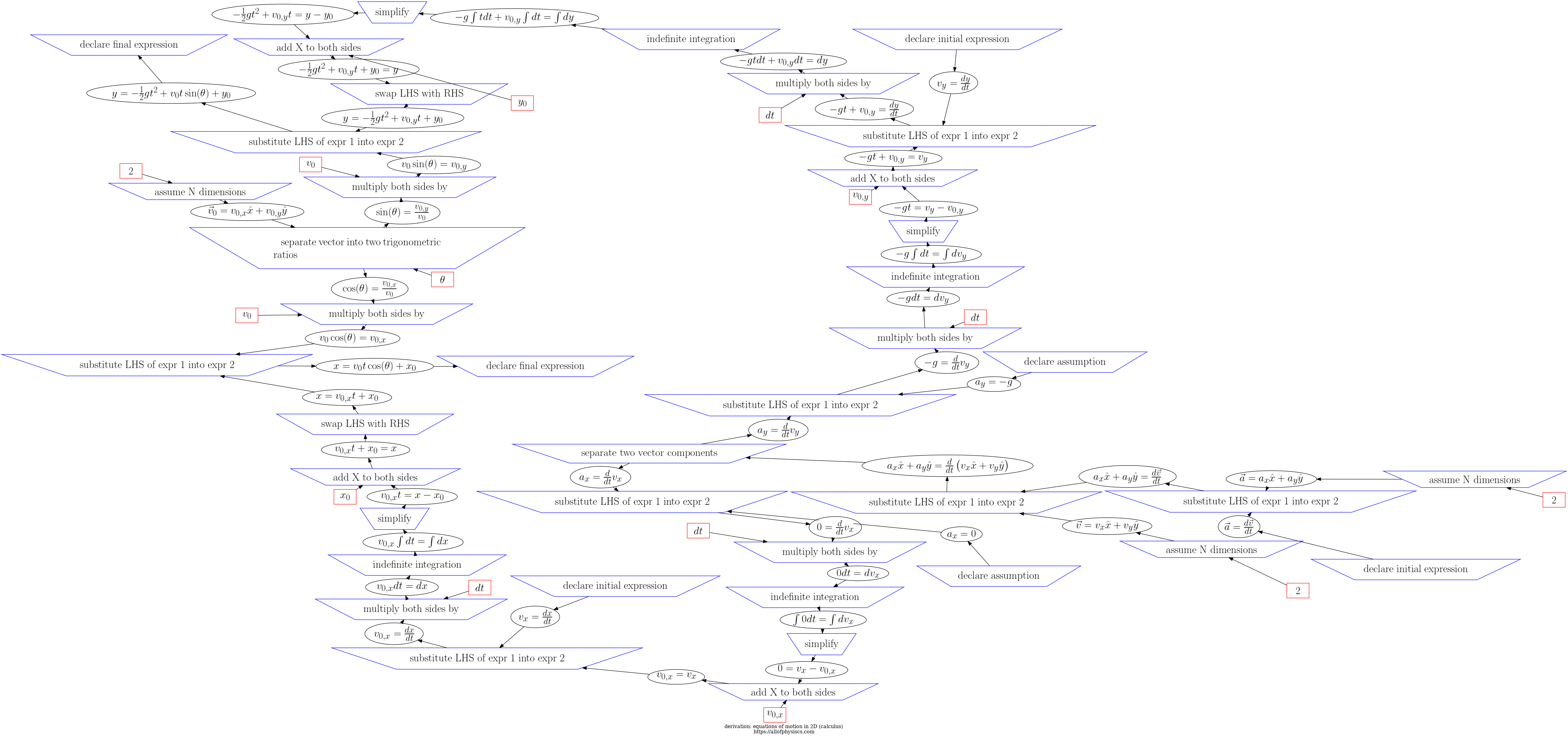
- 0000111981:
declare initial expression
- number of inputs: 0;
feeds: 0;
outputs: 1
- Eq.~\ref{eq:#1} is an initial equation.
|
|
|
- 3169580383
\(\vec{a} = \frac{d\vec{v}}{dt}\)
|
no validation is available for declarations |
|
3
|
- 0000111556:
substitute LHS of expr 1 into expr 2
- number of inputs: 2;
feeds: 0;
outputs: 1
- Substitute LHS of Eq.~\ref{eq:#1} into Eq.~\ref{eq:#2}; yields Eq.~\ref{eq:#3}.
|
- 8602512487
\(\vec{a} = a_x \hat{x} + a_y \hat{y}\)
- 3169580383
\(\vec{a} = \frac{d\vec{v}}{dt}\)
|
|
- 4158986868
\(a_x \hat{x} + a_y \hat{y} = \frac{d\vec{v}}{dt}\)
|
Not evaluated due to missing term in SymPy |
|
5
|
- 0000111556:
substitute LHS of expr 1 into expr 2
- number of inputs: 2;
feeds: 0;
outputs: 1
- Substitute LHS of Eq.~\ref{eq:#1} into Eq.~\ref{eq:#2}; yields Eq.~\ref{eq:#3}.
|
- 4158986868
\(a_x \hat{x} + a_y \hat{y} = \frac{d\vec{v}}{dt}\)
- 5349866551
\(\vec{v} = v_x \hat{x} + v_y \hat{y}\)
|
|
- 7729413831
\(a_x \hat{x} + a_y \hat{y} = \frac{d}{dt} \left(v_x \hat{x} + v_y \hat{y} \right)\)
|
Not evaluated due to missing term in SymPy |
|
6
|
- 0000111270:
separate two vector components
- number of inputs: 1;
feeds: 0;
outputs: 2
- Separate two vector components in Eq.~\ref{eq:#1}; yields Eq.~\ref{eq:#2} and Eq.~\ref{eq:#3}
|
- 7729413831
\(a_x \hat{x} + a_y \hat{y} = \frac{d}{dt} \left(v_x \hat{x} + v_y \hat{y} \right)\)
|
|
- 8228733125
\(a_y = \frac{d}{dt} v_y\)
- 1819663717
\(a_x = \frac{d}{dt} v_x\)
|
recognized infrule but not yet supported |
| Note about step 7: define the orientation of the coordinate system with respect to the gravitational acceleration such that $x$ axis is perpendicular to gravity |
|
7
|
- 0000111104:
declare assumption
- number of inputs: 0;
feeds: 0;
outputs: 1
- Eq.~\ref{eq:#1} is an assumption.
|
|
|
- 9707028061
\(a_x = 0\)
|
no validation is available for declarations |
| Note about step 8: define the orientation of the coordinate system with respect to the gravitational acceleration such that $y$ axis is parallel to gravity |
|
8
|
- 0000111104:
declare assumption
- number of inputs: 0;
feeds: 0;
outputs: 1
- Eq.~\ref{eq:#1} is an assumption.
|
|
|
- 2741489181
\(a_y = -g\)
|
no validation is available for declarations |
|
9
|
- 0000111791:
assume N dimensions
- number of inputs: 0;
feeds: 1;
outputs: 1
- Assume $#1$ dimensions; decompose vector to be Eq.~\ref{eq:#2}.
|
|
- 3270039798
\(2\)
|
- 8602512487
\(\vec{a} = a_x \hat{x} + a_y \hat{y}\)
|
no validation is available for assumptions |
|
10
|
- 0000111791:
assume N dimensions
- number of inputs: 0;
feeds: 1;
outputs: 1
- Assume $#1$ dimensions; decompose vector to be Eq.~\ref{eq:#2}.
|
|
- 8880467139
\(2\)
|
- 5349866551
\(\vec{v} = v_x \hat{x} + v_y \hat{y}\)
|
no validation is available for assumptions |
|
11
|
- 0000111556:
substitute LHS of expr 1 into expr 2
- number of inputs: 2;
feeds: 0;
outputs: 1
- Substitute LHS of Eq.~\ref{eq:#1} into Eq.~\ref{eq:#2}; yields Eq.~\ref{eq:#3}.
|
- 1819663717
\(a_x = \frac{d}{dt} v_x\)
- 9707028061
\(a_x = 0\)
|
|
- 8750379055
\(0 = \frac{d}{dt} v_x\)
|
valid |
|
12
|
- 0000111556:
substitute LHS of expr 1 into expr 2
- number of inputs: 2;
feeds: 0;
outputs: 1
- Substitute LHS of Eq.~\ref{eq:#1} into Eq.~\ref{eq:#2}; yields Eq.~\ref{eq:#3}.
|
- 8228733125
\(a_y = \frac{d}{dt} v_y\)
- 2741489181
\(a_y = -g\)
|
|
- 1977955751
\(-g = \frac{d}{dt} v_y\)
|
LHS diff is pdg0001649
RHS diff is -pdg0001649 |
|
13
|
- 0000111182:
multiply both sides by
- number of inputs: 1;
feeds: 1;
outputs: 1
- Multiply both sides of Eq.~\ref{eq:#2} by $#1$; yields Eq.~\ref{eq:#3}.
|
- 1977955751
\(-g = \frac{d}{dt} v_y\)
|
- 6672141531
\(dt\)
|
- 1702349646
\(-g dt = d v_y\)
|
LHS arithmetic error. Diff: pdg0001649*(dt - pdg0004711) |
|
14
|
- 0000111608:
indefinite integration
- number of inputs: 1;
feeds: 0;
outputs: 1
- Indefinite integral of both sides of Eq.~\ref{eq:#1}; yields Eq.~\ref{eq:#2}.
|
- 1702349646
\(-g dt = d v_y\)
|
|
- 8584698994
\(-g \int dt = \int d v_y\)
|
recognized infrule but not yet supported |
|
15
|
- 0000111457:
simplify
- number of inputs: 1;
feeds: 0;
outputs: 1
- Simplify Eq.~\ref{eq:#1}; yields Eq.~\ref{eq:#2}.
|
- 8584698994
\(-g \int dt = \int d v_y\)
|
|
- 9973952056
\(-g t = v_y - v_{0, y}\)
|
LHS diff is -dt*g + pdg0001467*pdg0001649
RHS diff is pdg0005153 + pdg0005674 - pdg0009431 |
|
16
|
- 0000111530:
add X to both sides
- number of inputs: 1;
feeds: 1;
outputs: 1
- Add $#1$ to both sides of Eq.~\ref{eq:#2}; yields Eq.~\ref{eq:#3}.
|
- 9973952056
\(-g t = v_y - v_{0, y}\)
|
- 4167526462
\(v_{0, y}\)
|
- 6572039835
\(-g t + v_{0, y} = v_y\)
|
RHS diff is -pdg0005153 - pdg0009107 + 2*pdg0009431 |
|
17
|
- 0000111981:
declare initial expression
- number of inputs: 0;
feeds: 0;
outputs: 1
- Eq.~\ref{eq:#1} is an initial equation.
|
|
|
- 7252338326
\(v_y = \frac{dy}{dt}\)
|
no validation is available for declarations |
|
18
|
- 0000111556:
substitute LHS of expr 1 into expr 2
- number of inputs: 2;
feeds: 0;
outputs: 1
- Substitute LHS of Eq.~\ref{eq:#1} into Eq.~\ref{eq:#2}; yields Eq.~\ref{eq:#3}.
|
- 6572039835
\(-g t + v_{0, y} = v_y\)
- 7252338326
\(v_y = \frac{dy}{dt}\)
|
|
- 6204539227
\(-g t + v_{0, y} = \frac{dy}{dt}\)
|
LHS diff is pdg0001467*pdg0006277 + pdg0009107 - pdg0009431
RHS diff is 0 |
|
19
|
- 0000111182:
multiply both sides by
- number of inputs: 1;
feeds: 1;
outputs: 1
- Multiply both sides of Eq.~\ref{eq:#2} by $#1$; yields Eq.~\ref{eq:#3}.
|
- 6204539227
\(-g t + v_{0, y} = \frac{dy}{dt}\)
|
- 1614343171
\(dt\)
|
- 8145337879
\(-g t dt + v_{0, y} dt = dy\)
|
LHS arithmetic error. Diff: pdg0001467*pdg0004711*(pdg0001649 - pdg0006277) |
|
20
|
- 0000111608:
indefinite integration
- number of inputs: 1;
feeds: 0;
outputs: 1
- Indefinite integral of both sides of Eq.~\ref{eq:#1}; yields Eq.~\ref{eq:#2}.
|
- 8145337879
\(-g t dt + v_{0, y} dt = dy\)
|
|
- 8808860551
\(-g \int t dt + v_{0, y} \int dt = \int dy\)
|
recognized infrule but not yet supported |
|
21
|
- 0000111457:
simplify
- number of inputs: 1;
feeds: 0;
outputs: 1
- Simplify Eq.~\ref{eq:#1}; yields Eq.~\ref{eq:#2}.
|
- 8808860551
\(-g \int t dt + v_{0, y} \int dt = \int dy\)
|
|
- 2858549874
\(- \frac{1}{2} g t^2 + v_{0, y} t = y - y_0\)
|
LHS diff is 0
RHS diff is pdg0001469 |
|
22
|
- 0000111530:
add X to both sides
- number of inputs: 1;
feeds: 1;
outputs: 1
- Add $#1$ to both sides of Eq.~\ref{eq:#2}; yields Eq.~\ref{eq:#3}.
|
- 2858549874
\(- \frac{1}{2} g t^2 + v_{0, y} t = y - y_0\)
|
- 6098638221
\(y_0\)
|
- 2461349007
\(- \frac{1}{2} g t^2 + v_{0, y} t + y_0 = y\)
|
valid |
|
23
|
- 0000111182:
multiply both sides by
- number of inputs: 1;
feeds: 1;
outputs: 1
- Multiply both sides of Eq.~\ref{eq:#2} by $#1$; yields Eq.~\ref{eq:#3}.
|
- 8750379055
\(0 = \frac{d}{dt} v_x\)
|
- 8717193282
\(dt\)
|
- 1166310428
\(0 dt = d v_x\)
|
RHS arithmetic error. Diff: -pdg0005005 |
|
24
|
- 0000111608:
indefinite integration
- number of inputs: 1;
feeds: 0;
outputs: 1
- Indefinite integral of both sides of Eq.~\ref{eq:#1}; yields Eq.~\ref{eq:#2}.
|
- 1166310428
\(0 dt = d v_x\)
|
|
- 2366691988
\(\int 0 dt = \int d v_x\)
|
recognized infrule but not yet supported |
|
25
|
- 0000111457:
simplify
- number of inputs: 1;
feeds: 0;
outputs: 1
- Simplify Eq.~\ref{eq:#1}; yields Eq.~\ref{eq:#2}.
|
- 2366691988
\(\int 0 dt = \int d v_x\)
|
|
- 1676472948
\(0 = v_x - v_{0, x}\)
|
LHS diff is 0
RHS diff is pdg0002958 + pdg0005005 - pdg0005505 |
|
26
|
- 0000111530:
add X to both sides
- number of inputs: 1;
feeds: 1;
outputs: 1
- Add $#1$ to both sides of Eq.~\ref{eq:#2}; yields Eq.~\ref{eq:#3}.
|
- 1676472948
\(0 = v_x - v_{0, x}\)
|
- 1439089569
\(v_{0, x}\)
|
- 6134836751
\(v_{0, x} = v_x\)
|
valid |
|
27
|
- 0000111981:
declare initial expression
- number of inputs: 0;
feeds: 0;
outputs: 1
- Eq.~\ref{eq:#1} is an initial equation.
|
|
|
- 8460820419
\(v_x = \frac{dx}{dt}\)
|
no validation is available for declarations |
|
28
|
- 0000111556:
substitute LHS of expr 1 into expr 2
- number of inputs: 2;
feeds: 0;
outputs: 1
- Substitute LHS of Eq.~\ref{eq:#1} into Eq.~\ref{eq:#2}; yields Eq.~\ref{eq:#3}.
|
- 8460820419
\(v_x = \frac{dx}{dt}\)
- 6134836751
\(v_{0, x} = v_x\)
|
|
- 7455581657
\(v_{0, x} = \frac{dx}{dt}\)
|
valid |
|
29
|
- 0000111182:
multiply both sides by
- number of inputs: 1;
feeds: 1;
outputs: 1
- Multiply both sides of Eq.~\ref{eq:#2} by $#1$; yields Eq.~\ref{eq:#3}.
|
- 7455581657
\(v_{0, x} = \frac{dx}{dt}\)
|
- 8607458157
\(dt\)
|
- 1963253044
\(v_{0, x} dt = dx\)
|
RHS arithmetic error. Diff: -pdg0009199 |
|
30
|
- 0000111608:
indefinite integration
- number of inputs: 1;
feeds: 0;
outputs: 1
- Indefinite integral of both sides of Eq.~\ref{eq:#1}; yields Eq.~\ref{eq:#2}.
|
- 1963253044
\(v_{0, x} dt = dx\)
|
|
- 3676159007
\(v_{0, x} \int dt = \int dx\)
|
recognized infrule but not yet supported |
|
31
|
- 0000111457:
simplify
- number of inputs: 1;
feeds: 0;
outputs: 1
- Simplify Eq.~\ref{eq:#1}; yields Eq.~\ref{eq:#2}.
|
- 3676159007
\(v_{0, x} \int dt = \int dx\)
|
|
- 9882526611
\(v_{0, x} t = x - x_0\)
|
LHS diff is 0
RHS diff is pdg0001464 + pdg0001572 - pdg0004037 |
|
32
|
- 0000111530:
add X to both sides
- number of inputs: 1;
feeds: 1;
outputs: 1
- Add $#1$ to both sides of Eq.~\ref{eq:#2}; yields Eq.~\ref{eq:#3}.
|
- 9882526611
\(v_{0, x} t = x - x_0\)
|
- 3182907803
\(x_0\)
|
- 8486706976
\(v_{0, x} t + x_0 = x\)
|
valid |
|
33
|
- 0000111268:
swap LHS with RHS
- number of inputs: 1;
feeds: 0;
outputs: 1
- Swap LHS of Eq.~\ref{eq:#1} with RHS; yields Eq.~\ref{eq:#2}.
|
- 8486706976
\(v_{0, x} t + x_0 = x\)
|
|
- 1306360899
\(x = v_{0, x} t + x_0\)
|
valid |
|
34
|
- 0000111791:
assume N dimensions
- number of inputs: 0;
feeds: 1;
outputs: 1
- Assume $#1$ dimensions; decompose vector to be Eq.~\ref{eq:#2}.
|
|
- 7049769409
\(2\)
|
- 9341391925
\(\vec{v}_0 = v_{0, x} \hat{x} + v_{0, y} \hat{y}\)
|
no validation is available for assumptions |
|
35
|
- 0000111295:
separate vector into two trigonometric ratios
- number of inputs: 1;
feeds: 1;
outputs: 2
- Separate vector in Eq.~\ref{eq:#2} into components related by angle $#1$; yields Eq.~\ref{eq:#3} and Eq.~\ref{eq:#4}.
|
- 9341391925
\(\vec{v}_0 = v_{0, x} \hat{x} + v_{0, y} \hat{y}\)
|
- 6410818363
\(\theta\)
|
- 7376526845
\(\sin(\theta) = \frac{v_{0, y}}{v_0}\)
- 7391837535
\(\cos(\theta) = \frac{v_{0, x}}{v_0}\)
|
recognized infrule but not yet supported |
|
36
|
- 0000111182:
multiply both sides by
- number of inputs: 1;
feeds: 1;
outputs: 1
- Multiply both sides of Eq.~\ref{eq:#2} by $#1$; yields Eq.~\ref{eq:#3}.
|
- 7391837535
\(\cos(\theta) = \frac{v_{0, x}}{v_0}\)
|
- 5868731041
\(v_0\)
|
- 6083821265
\(v_0 \cos(\theta) = v_{0, x}\)
|
RHS arithmetic error. Diff: -pdg0002958 + pdg0005153**2/pdg0002958 |
|
37
|
- 0000111556:
substitute LHS of expr 1 into expr 2
- number of inputs: 2;
feeds: 0;
outputs: 1
- Substitute LHS of Eq.~\ref{eq:#1} into Eq.~\ref{eq:#2}; yields Eq.~\ref{eq:#3}.
|
- 1306360899
\(x = v_{0, x} t + x_0\)
- 6083821265
\(v_0 \cos(\theta) = v_{0, x}\)
|
|
- 5438722682
\(x = v_0 t \cos(\theta) + x_0\)
|
LHS diff is -pdg0004037 + pdg0005153*cos(pdg0001575)
RHS diff is -pdg0001467*pdg0005153*cos(pdg0001575) - pdg0001572 + pdg0002958 |
|
38
|
- 0000111341:
declare final expression
- number of inputs: 1;
feeds: 0;
outputs: 0
- Eq.~\ref{eq:#1} is one of the final equations.
|
- 5438722682
\(x = v_0 t \cos(\theta) + x_0\)
|
|
|
no validation is available for declarations |
|
39
|
- 0000111182:
multiply both sides by
- number of inputs: 1;
feeds: 1;
outputs: 1
- Multiply both sides of Eq.~\ref{eq:#2} by $#1$; yields Eq.~\ref{eq:#3}.
|
- 7376526845
\(\sin(\theta) = \frac{v_{0, y}}{v_0}\)
|
- 5620558729
\(v_0\)
|
- 8949329361
\(v_0 \sin(\theta) = v_{0, y}\)
|
RHS arithmetic error. Diff: pdg0005153**2/pdg0009431 - pdg0009431 |
|
40
|
- 0000111268:
swap LHS with RHS
- number of inputs: 1;
feeds: 0;
outputs: 1
- Swap LHS of Eq.~\ref{eq:#1} with RHS; yields Eq.~\ref{eq:#2}.
|
- 2461349007
\(- \frac{1}{2} g t^2 + v_{0, y} t + y_0 = y\)
|
|
- 1405465835
\(y = - \frac{1}{2} g t^2 + v_{0, y} t + y_0\)
|
LHS diff is pdg0001467*(-pdg0009107 + pdg0009431)
RHS diff is 0 |
|
41
|
- 0000111556:
substitute LHS of expr 1 into expr 2
- number of inputs: 2;
feeds: 0;
outputs: 1
- Substitute LHS of Eq.~\ref{eq:#1} into Eq.~\ref{eq:#2}; yields Eq.~\ref{eq:#3}.
|
- 1405465835
\(y = - \frac{1}{2} g t^2 + v_{0, y} t + y_0\)
- 8949329361
\(v_0 \sin(\theta) = v_{0, y}\)
|
|
- 9862900242
\(y = - \frac{1}{2} g t^2 + v_0 t \sin(\theta) + y_0\)
|
LHS diff is pdg0005153*sin(pdg0001575) - pdg0005647
RHS diff is pdg0001467**2*pdg0001649/2 - pdg0001467*pdg0005153*sin(pdg0001575) - pdg0001469 + pdg0009431 |
|
42
|
- 0000111341:
declare final expression
- number of inputs: 1;
feeds: 0;
outputs: 0
- Eq.~\ref{eq:#1} is one of the final equations.
|
- 9862900242
\(y = - \frac{1}{2} g t^2 + v_0 t \sin(\theta) + y_0\)
|
|
|
no validation is available for declarations |
d3js visualization of steps and expressions in equations of motion in 2D (calculus)