Return to navigation page or list derivations
| step | inference rule | input | feed | output | step validity (as per SymPy) |
|---|---|---|---|---|---|
| 1 |
|
|
|
|
no validation is available for declarations |
| 2 |
|
|
|
|
LHS diff is pdg0005647 - pdg0007092 RHS diff is -pdg0001467**2*pdg0001649/2 + pdg0001467*pdg0005153*sin(pdg0001575) + pdg0001649*pdg0002467**2/2 - pdg0002467*pdg0005153*sin(pdg0001575) |
| Note about step 3: $y(t_f) = y_f = 0$ | |||||
| 3 |
|
|
|
|
no validation is available for assumptions |
| 4 |
|
|
|
|
valid |
| 5 |
|
|
|
|
no validation is available for declarations |
| 6 |
|
|
|
|
valid |
| 7 |
|
|
|
|
valid |
| 8 |
|
|
|
|
valid |
| 9 |
|
|
|
|
valid |
| 10 |
|
|
|
|
no validation is available for declarations |
| 11 |
|
|
|
|
LHS diff is -pdg0003652 + pdg0004037 RHS diff is pdg0005153*(pdg0001467 - pdg0002467)*cos(pdg0001575) |
| 12 |
|
|
|
|
no validation is available for assumptions |
| 13 |
|
|
|
|
LHS diff is -pdg0001943 + pdg0002467*pdg0005153*cos(pdg0001575) RHS diff is pdg0001943 - pdg0002467*pdg0005153*cos(pdg0001575) |
| 14 |
|
|
|
|
valid |
| 15 |
|
|
|
|
LHS diff is -pdg0001943 + pdg0002467 RHS diff is 2*pdg0005153*(-pdg0005153*cos(pdg0001575) + 1)*sin(pdg0001575)/pdg0001649 |
| 16 |
|
|
|
|
no validation is available for declarations |
| 17 |
|
|
|
|
valid |
| 18 |
|
|
|
|
LHS diff is -pdg0001943 + sin(2*pdg0001575) RHS diff is (pdg0001649 - pdg0005153**2)*sin(2*pdg0001575)/pdg0001649 |
| 19 |
|
|
|
|
recognized infrule but not yet supported |
| 20 |
|
|
|
|
LHS diff is pdg0001575 - pdg0001943 RHS diff is pdg0003141/4 - pdg0005153**2*sin(pdg0003141/2)/pdg0001649 |
| 21 |
|
|
|
|
LHS diff is 0 RHS diff is pdg0005153**2*(sin(pdg0003141/2) - 1)/pdg0001649 |
| 22 |
|
|
|
|
no validation is available for declarations |
| 23 |
|
|
|
|
no validation is available for declarations |
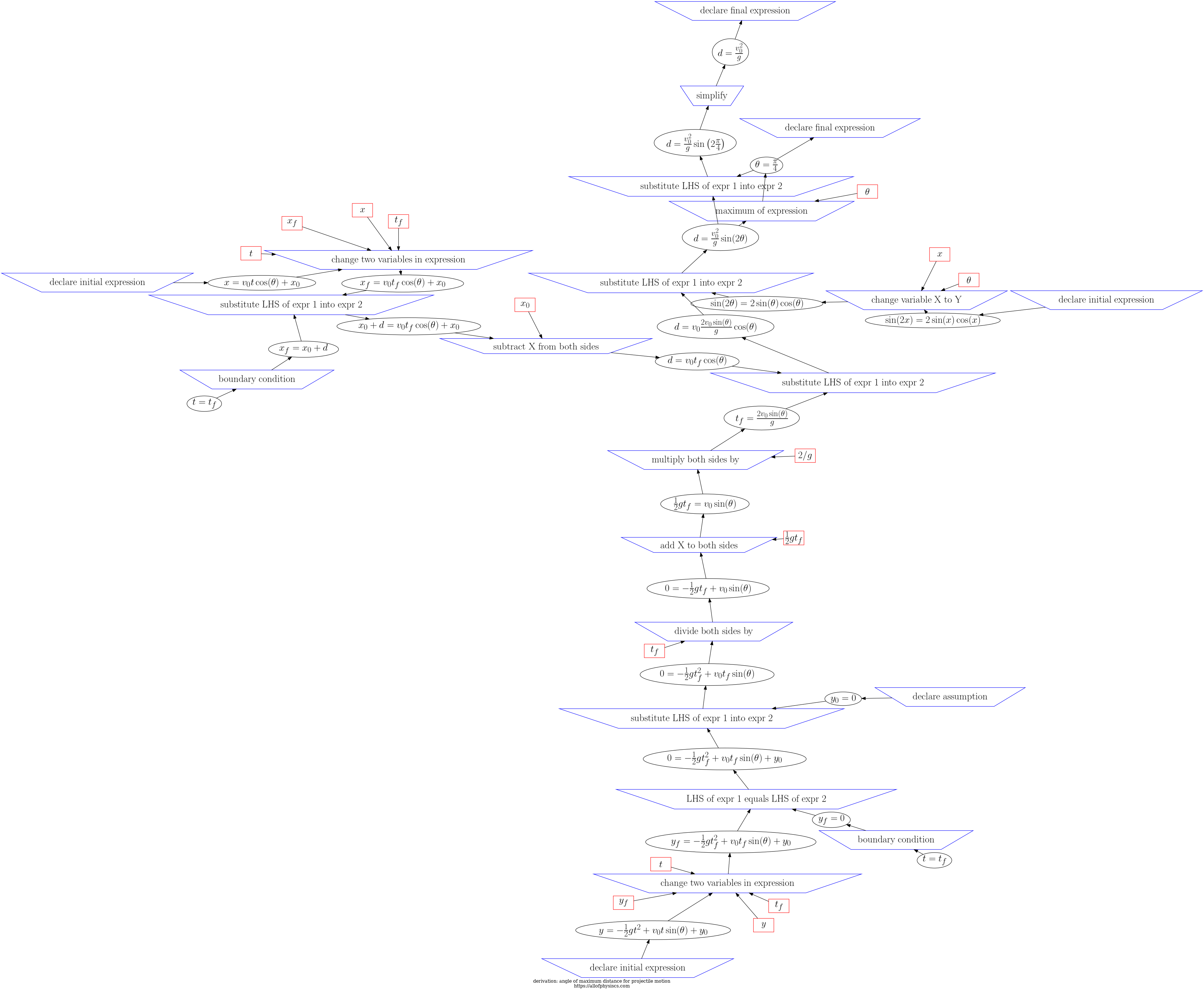
d3js visualization of steps and expressions in angle of maximum distance for projectile motion
pdg_app/to_review_derivation 5fdcd259-18c3-4935-8541-0e01a7677416compute/get_dict_of_steps_in_derivation: steps_in_this_derivation2d2508d6-4795-4699-99f0-a335abc3e49ccompute/input_feed_output_infrule_for_step: get_inference_rule_connected_to_step_ID2d2508d6-4795-4699-99f0-a335abc3e49ccompute/input_feed_output_infrule_for_step: get_expressions_from_step_id_and_expr_type HAS_INPUT2d2508d6-4795-4699-99f0-a335abc3e49ccompute/input_feed_output_infrule_for_step: get_expressions_from_step_id_and_expr_type, HAS_FEED2d2508d6-4795-4699-99f0-a335abc3e49ccompute/input_feed_output_infrule_for_step: get_expressions_from_step_id_and_expr_type, HAS_OUTPUT2d2508d6-4795-4699-99f0-a335abc3e49ccompute/get_dict_of_steps_in_derivation: get_sequence_index_for_step2d2508d6-4795-4699-99f0-a335abc3e49cpdg_app/ 5fdcd259-18c3-4935-8541-0e01a7677416