Return to navigation page or list derivations
| step | inference rule | input | feed | output | step validity (as per SymPy) |
|---|---|---|---|---|---|
| 1 |
|
|
|
|
no validation is available for declarations |
| 2 |
|
|
|
|
no validation is available for declarations |
| 3 |
|
|
|
|
no validation is available for declarations |
| 4 |
|
|
|
|
input diff is pdg0004183 - pdg0004202 diff is -pdg0001356*pdg0004037 - pdg0005156*pdg0009140 diff is pdg0001356*pdg0004037 + pdg0005156*pdg0009140 |
| 5 |
|
|
|
|
valid |
| 6 |
|
|
|
|
input diff is a - pdg0009140 diff is d**2*(-pdg0004037 + x)/dt**2 diff is 0 |
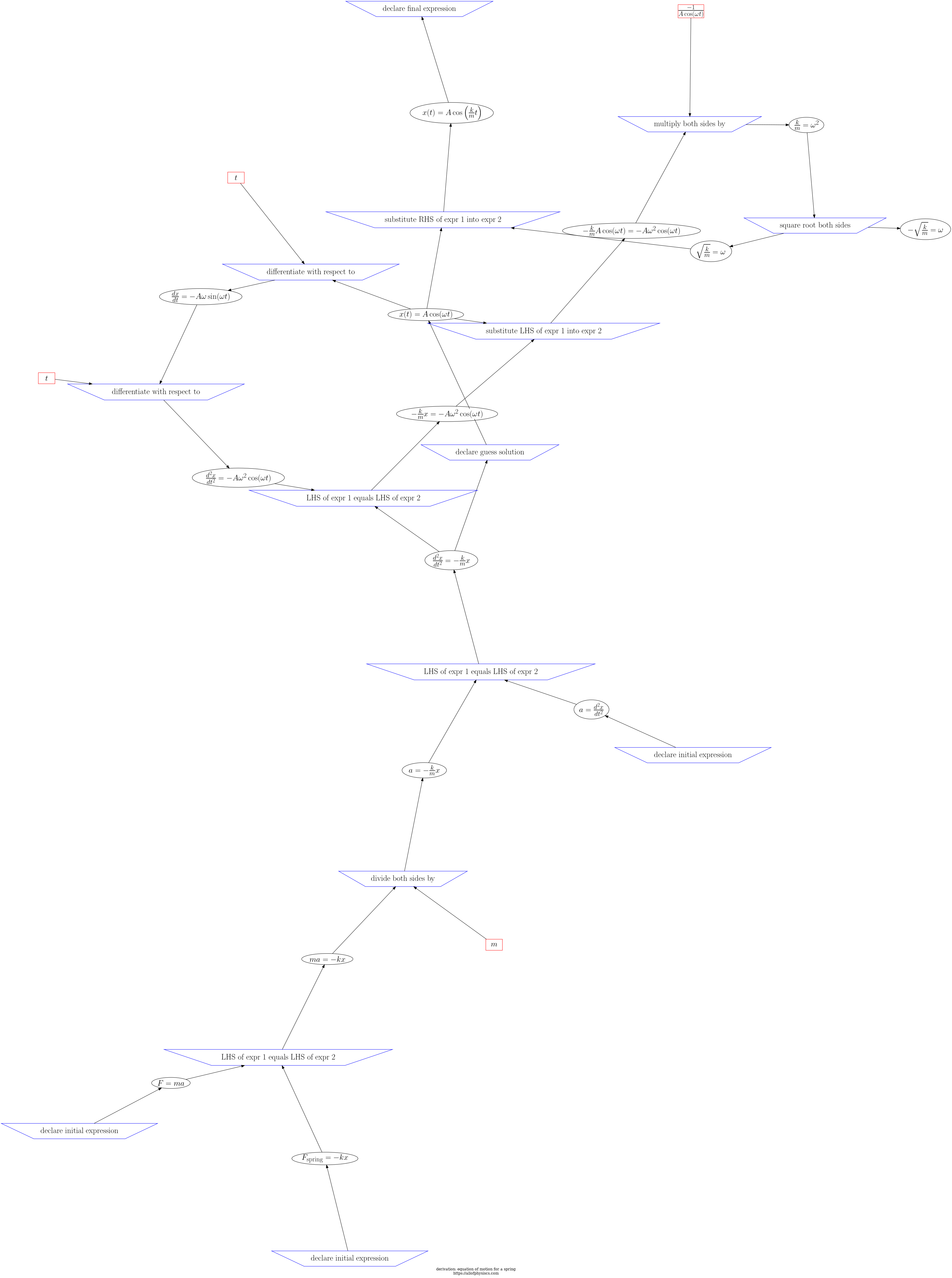
| Note about step 7: what, when differentiated twice, yields a negative of itself? cosine | |||||
| 7 |
|
|
|
|
no validation is available for declarations |
| 8 |
|
|
|
|
LHS diff is 0 RHS diff is pdg0002321*pdg0009885*sin(pdg0001467*pdg0002321) |
| 9 |
|
|
|
|
LHS diff is -d**2*x/dt**2 RHS diff is 0 |
| 10 |
|
|
|
|
input diff is d**2*(pdg0004037 - x)/dt**2 diff is (k*x - pdg0001356*pdg0004037)/pdg0005156 diff is pdg0002321**2*(A*cos(pdg0002321*pdg0009491) - pdg0009885*cos(pdg0001467*pdg0002321)) |
| 11 |
|
|
|
|
LHS diff is A*k*cos(pdg0002321*pdg0009491)/pdg0005156 + x(pdg0001467) RHS diff is A*pdg0002321**2*cos(pdg0002321*pdg0009491) + pdg0009885*cos(pdg0001467*pdg0002321) |
| 12 |
|
|
|
|
LHS arithmetic error. Diff: -(A*k*pdg0001467*cos(pdg0002321*pdg0009491) + pdg0001356)/pdg0005156 |
| 13 |
|
|
|
|
|
| 14 |
|
|
|
|
LHS diff is sqrt(pdg0001356/pdg0005156) - x(pdg0001467) RHS diff is pdg0002321 - pdg0009885*cos(k*pdg0001467/pdg0005156) |
| 15 |
|
|
|
|
no validation is available for declarations |
d3js visualization of steps and expressions in equation of motion for a spring
pdg_app/to_review_derivation f0f21065-0850-45c2-8609-8fe384ab10a0compute/get_dict_of_steps_in_derivation: steps_in_this_derivation83239612-ec36-4555-bee1-56f70b329245compute/input_feed_output_infrule_for_step: get_inference_rule_connected_to_step_ID83239612-ec36-4555-bee1-56f70b329245compute/input_feed_output_infrule_for_step: get_expressions_from_step_id_and_expr_type HAS_INPUT83239612-ec36-4555-bee1-56f70b329245compute/input_feed_output_infrule_for_step: get_expressions_from_step_id_and_expr_type, HAS_FEED83239612-ec36-4555-bee1-56f70b329245compute/input_feed_output_infrule_for_step: get_expressions_from_step_id_and_expr_type, HAS_OUTPUT83239612-ec36-4555-bee1-56f70b329245compute/get_dict_of_steps_in_derivation: get_sequence_index_for_step83239612-ec36-4555-bee1-56f70b329245pdg_app/ f0f21065-0850-45c2-8609-8fe384ab10a0