This page contains three views of the steps in the derivation: d3js, graphviz PNG, and a table.
Notes for this derivation:
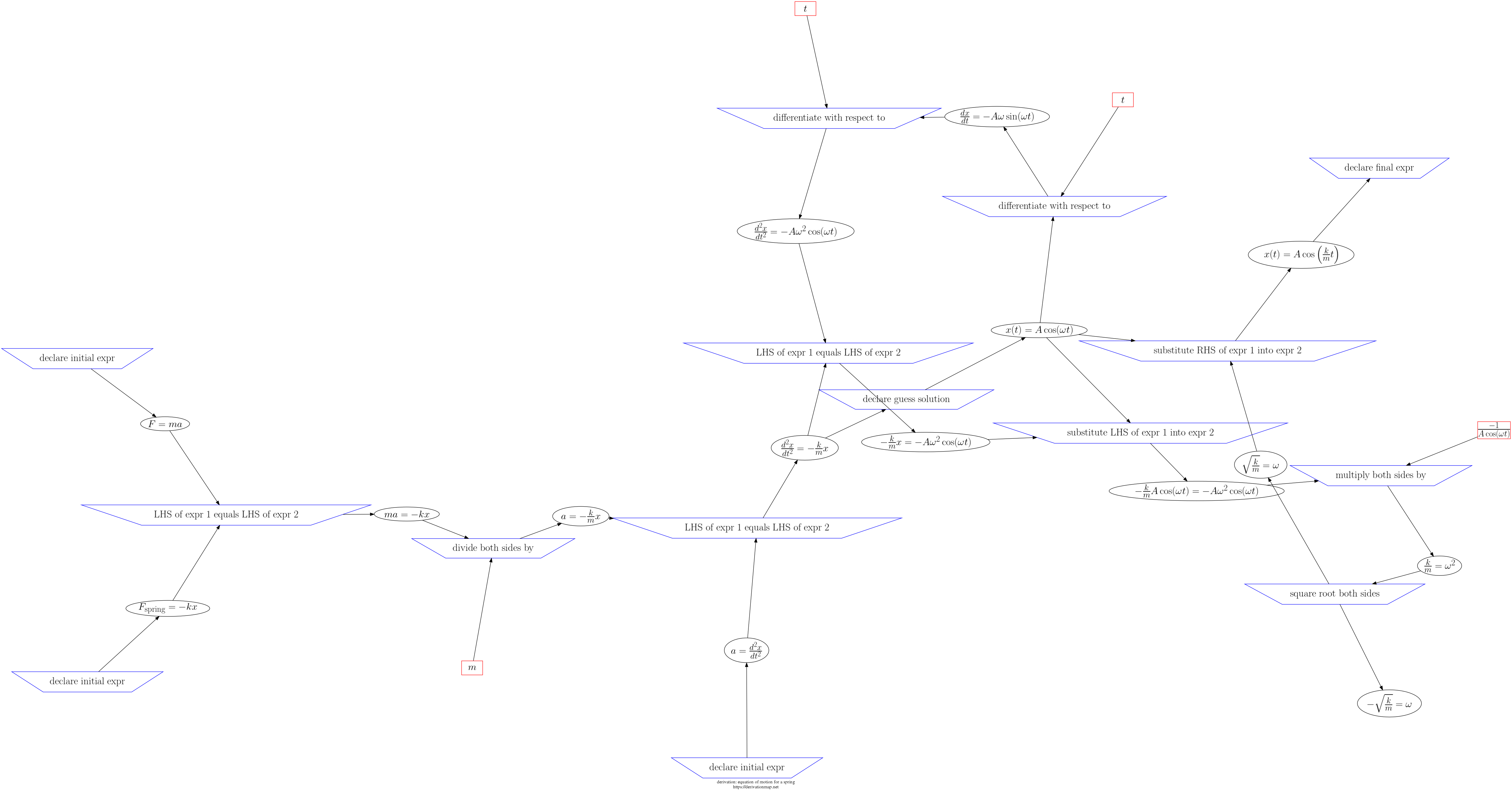
| Index | Inference Rule | Input latex | Feeds latex | Output latex | step validity | dimension check | unit check | notes |
|---|---|---|---|---|---|---|---|---|
| 3 | declare initial expr |
|
|
|
no validation is available for declarations |
6831694380:
|
6831694380:
|
|
| 7 | declare guess solution |
|
|
|
no validation is available for declarations |
8991236357:
5415824175: |
8991236357:
5415824175: |
what, when differentiated twice, yields a negative of itself? cosine |
| 10 | LHS of expr 1 equals LHS of expr 2 |
|
|
|
input diff is d**2*(-pdg4037 + x)/dt**2 diff is -k*x/pdg5156 + pdg2321**2*pdg9885*cos(pdg1467*pdg2321) diff is -A*pdg2321**2*cos(pdg2321*pdg9491) + pdg1356*pdg4037/pdg5156 |
5945893986:
8991236357: 1772973171: |
5945893986:
8991236357: 1772973171: |
|
| 11 | substitute LHS of expr 1 into expr 2 |
|
|
|
LHS diff is k*(A*cos(pdg2321*pdg9491) - x)/pdg5156 RHS diff is 0 |
5415824175:
1772973171: 2148049269: |
5415824175:
1772973171: 2148049269: |
|
| 13 | square root both sides |
|
|
|
no check performed |
1931103031:
1784114349: 1888494137: |
1931103031:
1784114349: 1888494137: |
|
| 1 | declare initial expr |
|
|
|
no validation is available for declarations |
5345738321:
|
5345738321:
|
|
| 2 | declare initial expr |
|
|
|
no validation is available for declarations |
4428528271:
|
4428528271:
|
|
| 6 | LHS of expr 1 equals LHS of expr 2 |
|
|
|
input diff is -a + pdg9140 diff is d**2*pdg4037/dt**2 + pdg1356*pdg4037/pdg5156 diff is -d**2*x/dt**2 - pdg1356*pdg4037/pdg5156 |
8655294002:
6831694380: 8991236357: |
8655294002:
6831694380: 8991236357: |
|
| 4 | LHS of expr 1 equals LHS of expr 2 |
|
|
|
input diff is -pdg4183 + pdg4202 diff is 0 diff is 0 |
5345738321:
4428528271: 2334518266: |
5345738321:
4428528271: 2334518266: |
|
| 12 | multiply both sides by |
|
|
|
LHS diff is -(A*k*pdg1467*cos(pdg2321*pdg9491) + pdg1356)/pdg5156 RHS diff is -pdg2321**2*(A*pdg1467*cos(pdg2321*pdg9491) + 1) |
2148049269:
1931103031: |
2148049269:
1931103031: |
|
| 9 | differentiate with respect to |
|
|
|
no check performed |
7652131521:
5945893986: |
7652131521:
5945893986: |
|
| 5 | divide both sides by |
|
|
|
valid |
2334518266:
8655294002: |
2334518266:
8655294002: |
|
| 8 | differentiate with respect to |
|
|
|
no check performed |
5415824175:
7652131521: |
5415824175:
7652131521: |
|
| 14 | substitute RHS of expr 1 into expr 2 |
|
|
|
LHS diff is 0 RHS diff is pdg9885*(cos(pdg1467*sqrt(pdg1356/pdg5156)) - cos(k*pdg1467/pdg5156)) |
1784114349:
5415824175: 6908055431: error for dim with 6908055431 |
1784114349:
5415824175: 6908055431: N/A |
|
| 15 | declare final expr |
|
|
|
no validation is available for declarations |
6908055431:
error for dim with 6908055431 |
6908055431:
N/A |